

- 资讯分类
- 联系我们
-
联系人:李工
手 机:13592785895
电 话:0769-85158678
传 真:0769-85156778
地 址:东莞市南城区天安数码城C2栋305室

-
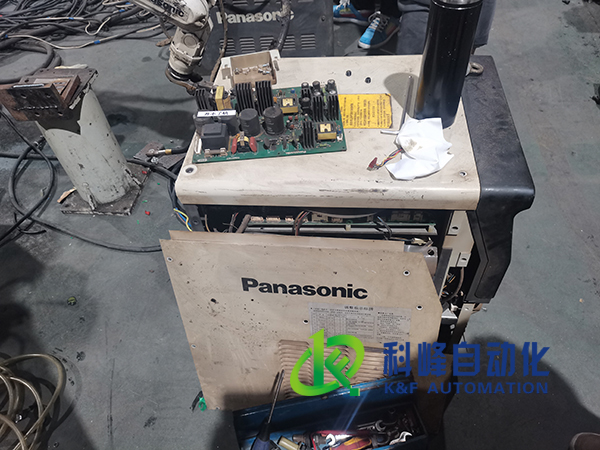
松下焊接机器人维修电机方法时间:2022-01-05 | 来源:科峰自动化
松下焊接机器人维修时经常碰到电机坏的情况,电机线圈问题,刹车问题,编码器问题等,小编就来说下电机问题如何解决。
伺服电机噪声过大,电机带动负载运转不稳定,问题根源:这种噪声和不稳定性,是来源于机械传动装置,是由于伺服系统反应速度与机械传递或者反应时间不相匹配而引起的,即松下伺服电机响应快于系统调整新的扭矩所需的时间。
松下焊接机器人维修师傅给的解决办法:增加机械刚性和降低系统的惯性,减少机械传动部位的响应时间,如把形带更换成直接丝杆传动或用齿轮箱代替V型带,降低伺服系统的响应速度,减少伺服系统的控制带宽,如降低伺服系统的增益参数值。
我司松下焊接机器人维修师傅也碰到电路板的问题,比如在TPS6机键盘监控下,Al2接0电平,刚好为偶地址数据,使用小程序即可达到此目地,这里小程序略,经此方法取得第7片数据,反汇编分析发现,2764芯片A脚位总是处“0”电平造成了有一序不合理,即一半对、一半错,缺少Aa位。
我们在TP86机上对A位脚当它应为“1”时强加+5 电平,然后通过串行口读入IBMPC软盘记录,连接整个程序反汇编分析正常,最后将完整程序写入新2764插人该机器人工作正常、性能恢复,保证了汽车线正常生产。相关资讯
